















Komunikacja pod wodą jest dość skomplikowana. Głównym problemem jest woda, która tłumi sygnały radiowe i nie pozwala na bezpośrednie stosowanie rozwiązań używanych na lądzie. Jednak naukowcy z KAUST znaleźli interesujące rozwiązanie tego problemu. System o nazwie Aqua-Fi pozwala na używanie smartfonów z Wi-Fi pod wodą. Jak jest to możliwe?
Współcześnie przyjęło się, że terminy komunikacja bezprzewodowa oraz radiokomunikacja są pojęciami bliskoznacznymi. Jednak tak naprawdę łączność bezprzewodowa obejmuje również inne media transmisyjne. W przypadku komunikacji podwodnej można korzystać z fal akustycznych, radiowych oraz sygnałów optycznych. O ile łączność oparta na ultradźwiękach zapewnia dalekie zasięgi, to nie oferuje ona szybkiego przesyłu danych. Dlatego też naukowcy z Uniwersytet Nauki i Techniki Króla Abdullaha (KAUST) postanowili zbudować system Aqua-Fi, który łączy zalety dwóch pozostałych technologii i jednocześnie minimalizuje wpływ ich wad. Fale radiowe mogą zapewnić szybki przesył danych, ale są silnie tłumione przez wodę. Dlatego też można je używać tylko do komunikacji krótkodystansowej. Z kolei komunikacja optyczna oferuje zarówno wysokie transfery, jak i dalekie zasięgi, ale stwarza problemy związane z dokładnym pozycjonowaniem nadajnika z odbiornikiem.
Aqua-Fi bazuje na prostym (i tanim) optycznym „wzmacniaczu” Wi-Fi
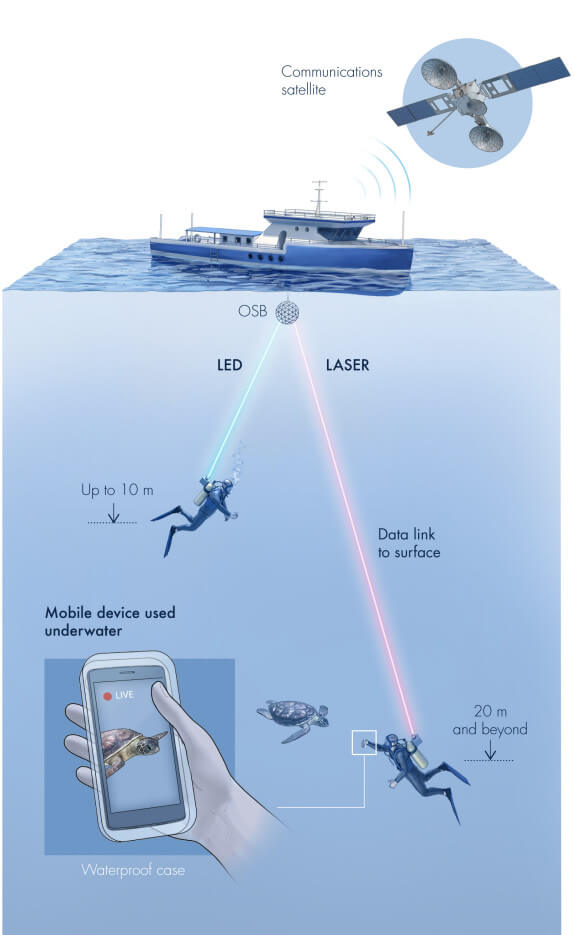
Cały pomysł bazuje na tym, że urządzeniem końcowym, z którego korzysta płetwonurek, jest smartfon zamknięty w wodoszczelnej obudowie. Dzięki temu można z niego korzystać na głębokości powyżej 20 metrów. Przy takiej odległości sygnał Wi-Fi nie może dotrzeć na powierzchnię. Dlatego też przy butli z tlenem instalowany jest konwerter, który przekształca sygnał radiowy na optyczny i odwrotnie. W praktyce jest to komputer na bazie Raspberry Pi. Oprócz wbudowanego modułu Wi-Fi posiada on zielone diody LED, fotodetektor DET10A2 oraz komunikacyjny system laserowy firmy SaNoor Technologies.
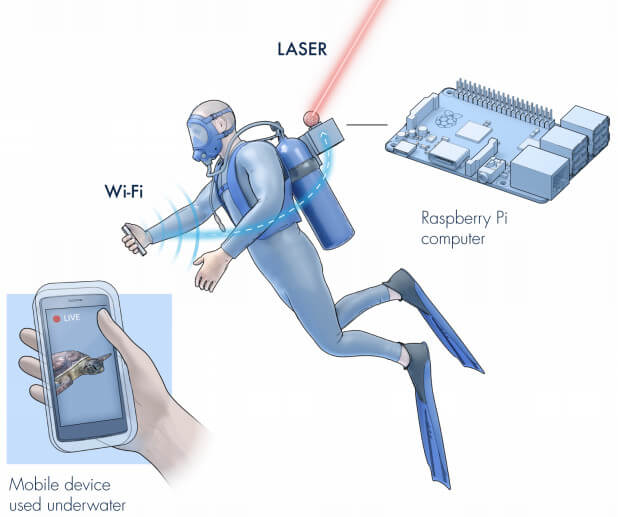
System Aqua-Fi bazuje na komputerze, który pełni rolę routera. To właśnie on utrzymuje łączność z jednostką pływającą. Kiedy płetwonurek utrzymuje głębokość do 10 m, łączność realizowana jest z użyciem diod LED. Z kolei na większych głębokościach używana jest komunikacja laserowa. Rozwiązanie to oferuje przepustowość na poziomie 2 Mbit/s i opóźnienie (ping) 1,1 ms. Przy czym nie jest ono gotowe do komercyjnego wdrożenia. Naukowcy muszą jeszcze popracować nad zwiększeniem stabilności oraz rozważyć wprowadzenie sferycznego odbiornika optycznego. Największe wyzwanie będzie stanowić utrzymanie stabilnego połączenia przy ciągle zmieniającym się położeniu płetwonurka względem jednostki pływającej.
Źródło: KAUST, IEEE Communications Magazine




